One-Liner
Uses the single-user avoidance POMDP formulation presented in (Bouton, Cosgun, and Kochenderfer 2017) to extend to multiple road users
Novelty
Uses Single-User Model of Road Navigation to extend general POMDP formulation into multi-pedestrian/multi road user casesroad user cases
Previous Work
Imagine worst-case scenario always: set upper bound and always imagine it; could cause gridlock if situation never resolves.
Notable Methods
Uses QMDP and SARSOP to perform optimization
Single-User Model of Road Navigation
See Single-User Model of Road Navigation
Scaling to multiple road users
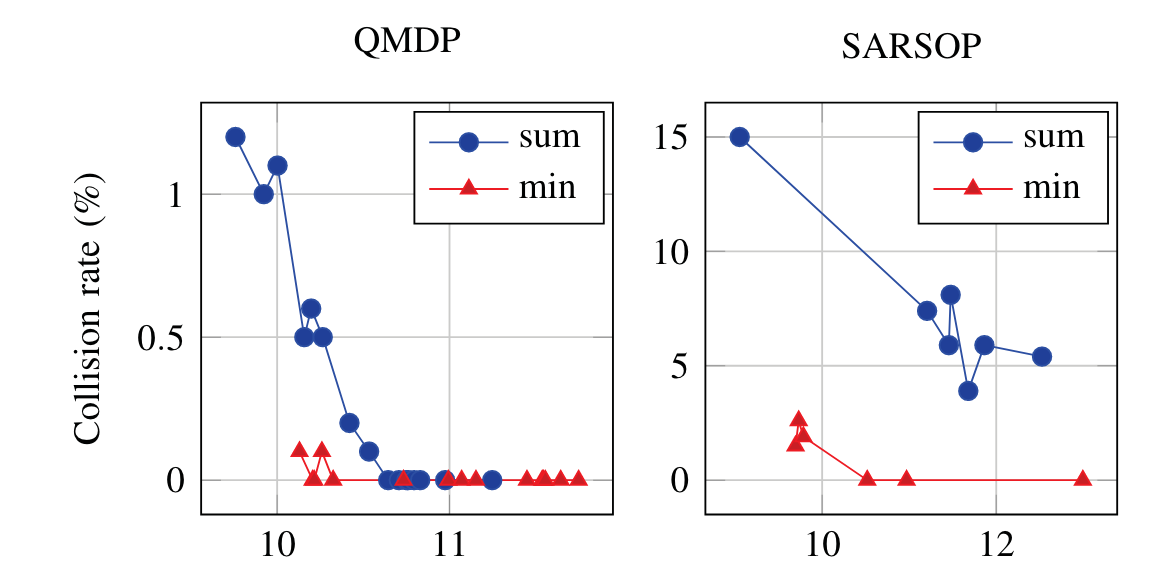
- make an aggregate utility which is a function across all the single-user avoidance strategies (i.e. the aggregate utiltiy of mulitlpe road user is the utility of avoiding each individual user) \(U^{*}(b,a) = f(U^{*}(b_1, a) … U^{*}(b_{n}, a)\). this is called utility fusion
- two possible approaches: either minimum of all the utilities, or the sum of them; the former is more risk averse (we want to hit no one), and latter treats each user is independent.
- further, the number of users in the road is modeled by a belief
Evaluation
“the evaluation models are different to find the optimal policy, and are also higher fidelity”
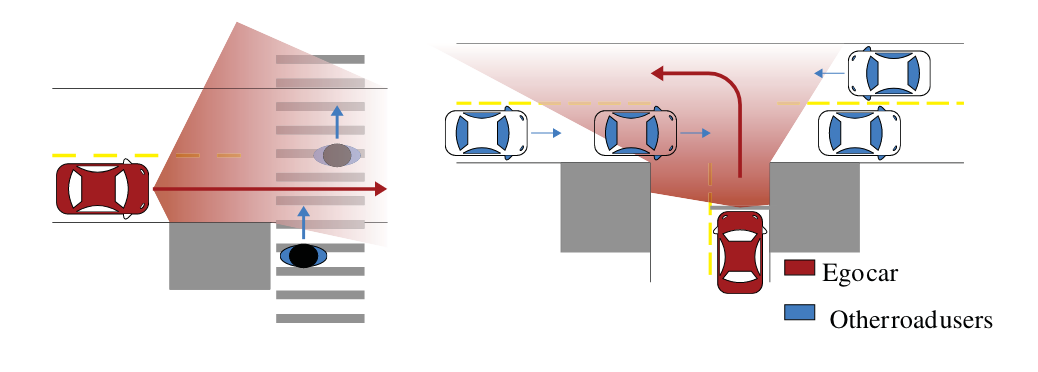
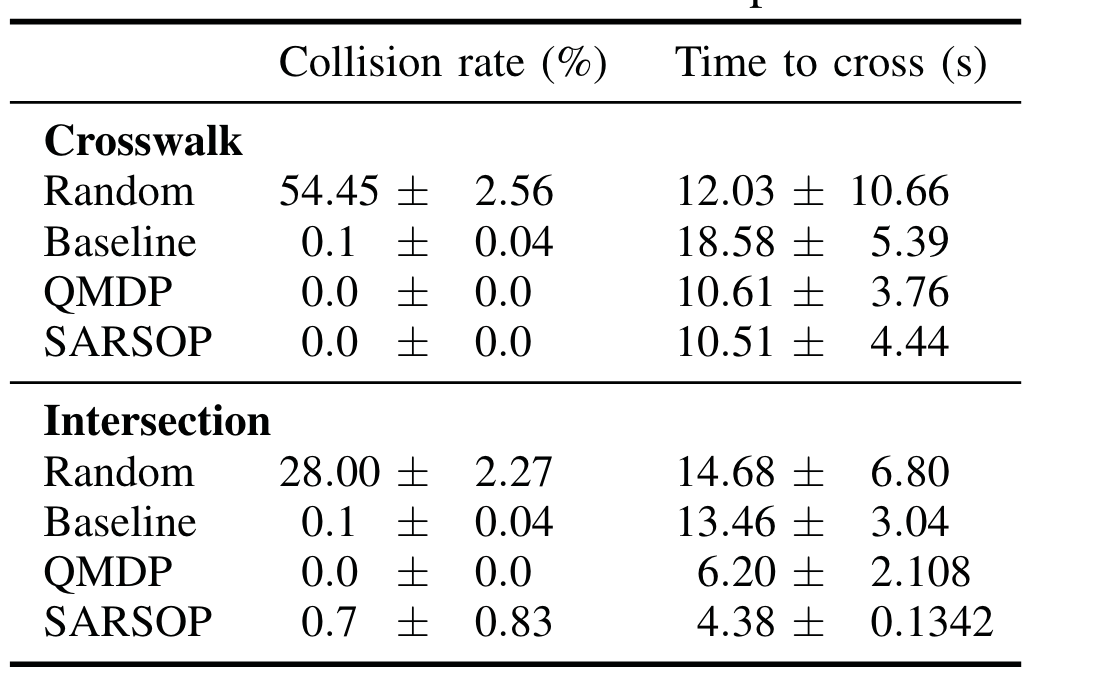
We want to evaluate our POMDP on a higher fidelity model to check if the system can generalize to harder environments.
Baselines: random actions, or hand crafted rules-based policy.
Key Figs
New Concepts
Single-User Model of Road Navigation
POMDP formulation; we only care about one road user
- action: a finite set of change in acceleration -4m/s2, -2m/s2, 0m/s2, 2m/s2, 4m/s2
- states and transitions: poses (position + velocity) of the car and the road user; position are velocities are discretized
- observation: measured position and velocity of the one other road user with a pm 1 meter variance for crosswalks and pm 2 meter variance for intersection
- users in non-occluded area will always be detected
- user in an occluded area will not be detected
- position and velocity of road users are uncertain pm 1 meter and pm 1 meter / second
- belief: categorical distribution over states
- dynamics: physics + kinematics for car; pedestrians have stochastic velocity
- reward: unit reward for final position, tuned penalty for collision