One-Liner
UAV navigation through leveraging updrafts, handling their unpredictability with POMDPs and Receeding Horizon.
Novelty
- Developed new method for low-cost POMDP online solving
- Cool bird.
Notable Methods
two main steps
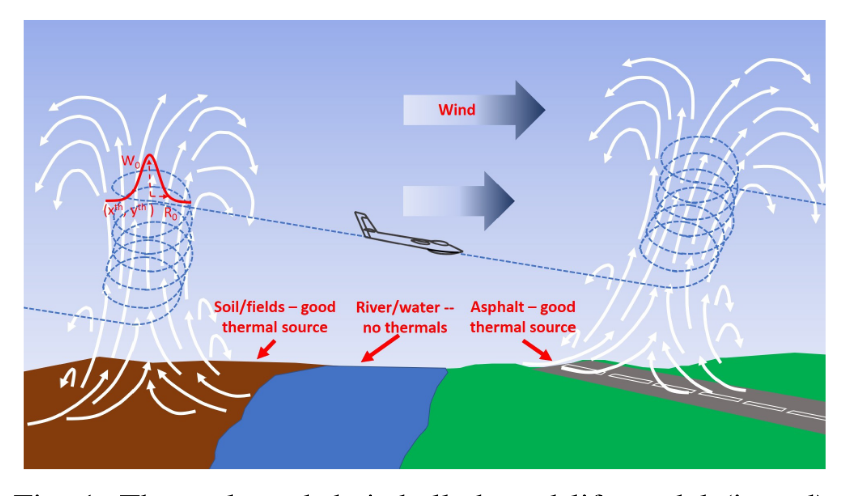
- explore: determine thermal parameters
- exploit: plan a trajectory to exploit the thermal
formulation
- \(\mathcal{S}\): \(s^{u} \in \mathbb{R}^{6}\), the joint state of the UAV (2D location wrt fixed point + air speech + heading, bank, roll, altitude), and \(s^{th} \in \mathbb{R}^{2}\),the thermal status (thermal center x and y relative to UAV)
- \(\mathcal{A}\): discretized arc trajectory segments by bank angles \(\phi_{1 \dots n}\), which executes for a fixed \(T_{A}\) seconds
- \(\mathcal{T}\): Gaussian of \(s^{u}\) over the dynamics of the UAV, and over fixed noise covariance \(Q\)
- \(\mathcal{R}\): \(h_{s’}-h_{s}\), the change in altitude….
- \(\mathcal{O}\): senor readings
- \(O(a, s’, o)\): fixed noise covariance \(R\)
- \(b_0\): product of two Gaussian of the UAV’s position and the belief about the underlying thermals
- \(update(b,a,o)\): EKF
modeling assumptions:
- thermal consistency: the world model change frequency less than control
- thermal stationarity: thermal doesn’t move against surrounding air
- no pitch angle control: reward hacking may happen
- no turbulence: thermal doesn’t sang horizontal displacements
POMDSoar
The exact solution to the POMDP as proposed makes aggressive decisions in order to simplify costs to run on a PixHawk.
We need to explicitly build in a exploration/exploitation tradeoff.
Key Figs
comparison against ardusoar: EKF + just circling

ArduPilot’s implementation is worse
New Concepts
POMDSoar, the soring mechanism