Humans either over-rely (drive a Tesla while sleeping) or under rely (interfering) with robot’s actions.
- human and robot interactions may depend on entire history
- trust is a proxy for the full interaction history
- the human’s policy must be modeled by th robot
- trust is demonstrated through real-world experimentation
Formulation
Add two variable
- Trust: \(\theta_{t}\), the robot’s ability to succeed in a task
- Performance: \(e_{t+1}\), success or failure in attempting a task
the trust model probabilities for model’s correct modeling of humans are low: high variance between participants.
Trust Dynamics
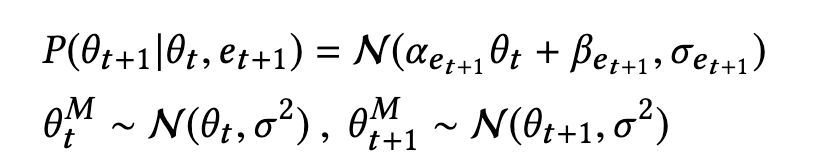
models human’s trust in the robot as a linear gaussian.
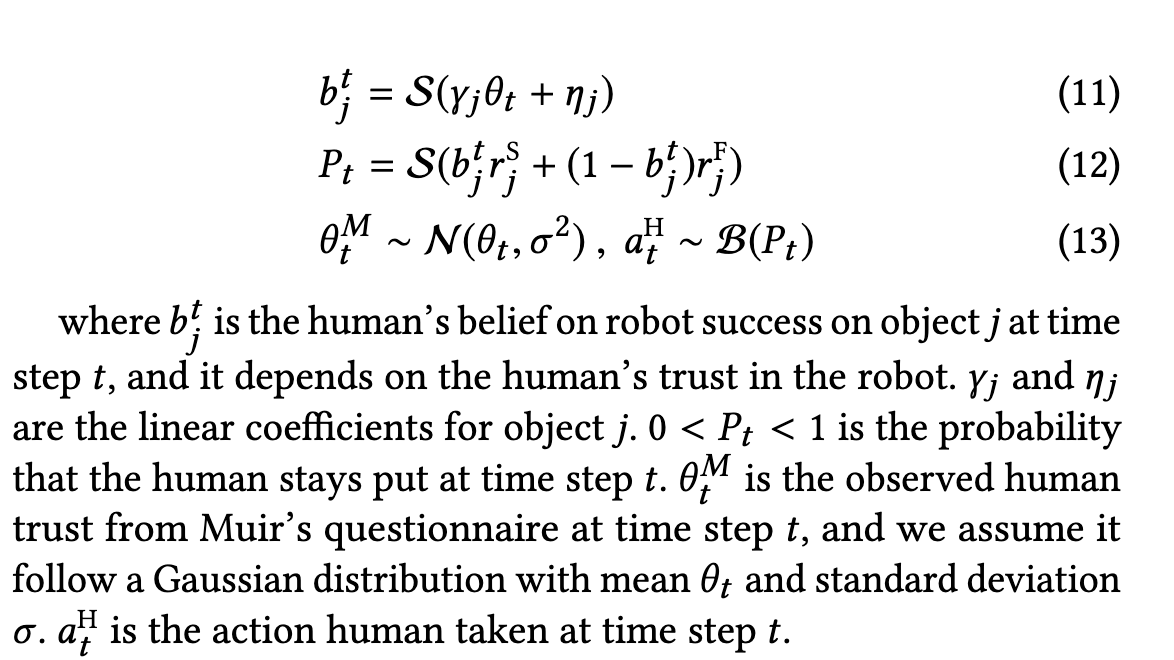
Human Model
Results
Sadly, the system didn’t actually increase in trust score, but the performance was better through lower human intervention.