Fundamental Theorem of Calculus
Last edited: August 8, 2025Lovely, well known result:
\begin{equation} \dv x \int_{a}^{x} f(t)\dd{t} = f(x) \end{equation}
for any fixed \(a\). This is because that’s functionally using \(a\) as a \(+C\) term.
fundamental theorem of linear maps
Last edited: August 8, 2025The dimension of the null space plus the dimension of the range of a Linear Map equals the dimension of its domain.
This also implies that both the null space (but this one’s trivial b/c the null space is a subspace of the already finite-dimensional domain) and the range as well is finite-dimensional.
constituents
- \(T \in \mathcal{L}( V,W )\)
- finite-dimensional \(V\) (otherwise commenting on computing its dimension doesn’t make sense)
requirements
\begin{equation} \dim V = \dim null\ T + \dim range\ T \end{equation}
fusion (machine learning)
Last edited: August 8, 2025fusion in machine learning is the process of adding features or encoding.
late fusion
late fusion adds features together to a model in a multi-modal approach by first embedding the features separately
early fusion
early fusion adds features together to a model in a multi-modal approach by concatenating the features first then embedding
FV-POMCPs
Last edited: August 8, 2025Main problem: joint actions and observations are exponential by the number of agents.
Solution: Smaple-based online planning for multiagent systems. We do this with the factored-value POMCP.
- factored statistics: reduces the number of joint actions (through action selection statistics)
- factored trees: reduces the number of histories
Multiagent Definition
- \(I\) set of agents
- \(S\) set of states
- \(A_{i}\) set of states for each agent \(i\)
- \(T\) state transitions
- \(R\) reward function
- \(Z_{i}\) joint observations for each agents
- \(O\) set of observations
Coordination Graphs
you can use sum-product elimination to shorten the Baysian Network of the agent Coordination Graphs (which is how agents influnece each other).
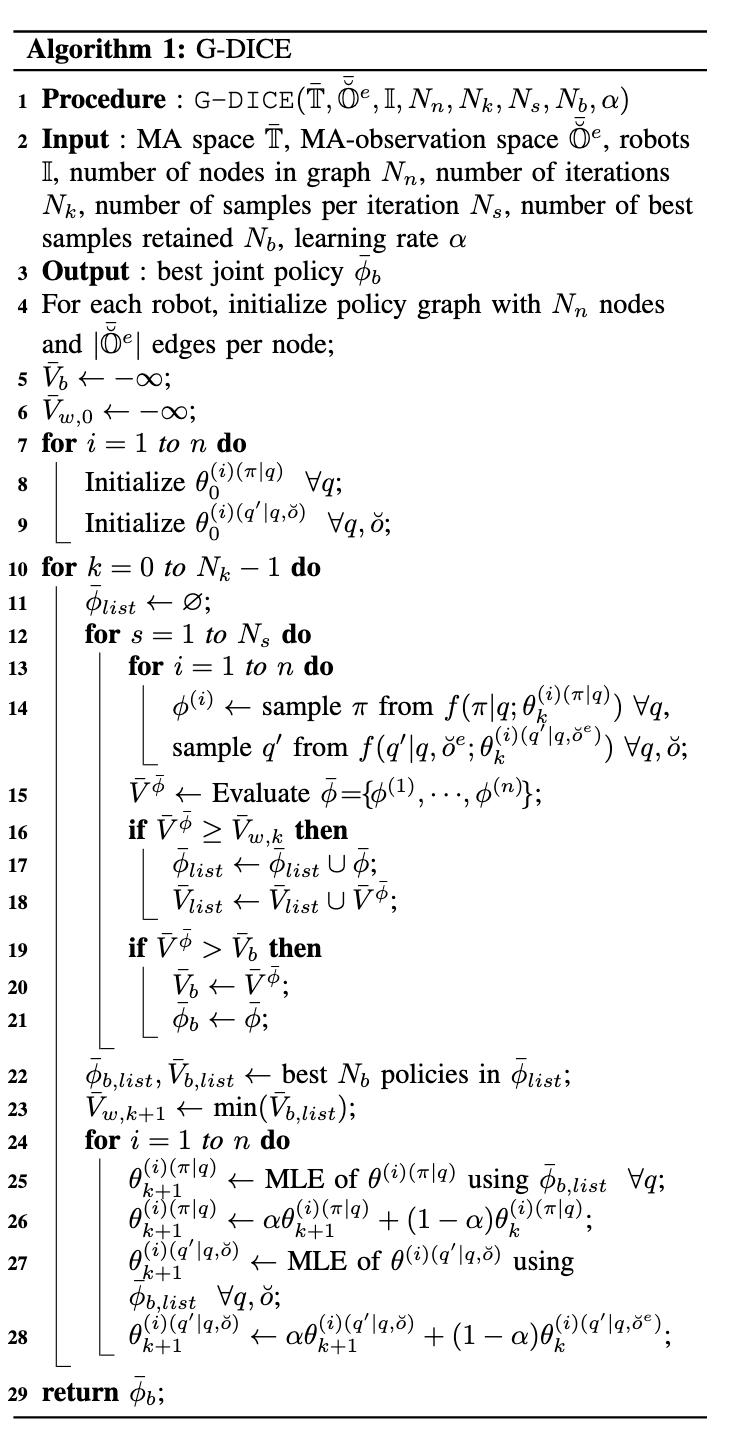
G-DICE
Last edited: August 8, 2025Motivation
Its the same. It hasn’t changed: curses of dimensionality and history.
Goal: to solve decentralized multi-agent MDPs.
Key Insights
- macro-actions (MAs) to reduce computational complexity (like hierarchical planning)
- uses cross entropy to make infinite horizon problem tractable
Prior Approaches
- masked Monte Carlo search: heuristic based, no optimality garantees
- MCTS: poor performance
Direct Cross Entropy
see also Cross Entropy Method
- sample a value function \(k\)
- takes \(n\) highest sampled values
- update parameter \(\theta\)
- resample until distribution convergence
- take the best sample \(x\)
G-DICE
- create a graph with exogenous \(N\) nodes, and \(O\) outgoing edges (designed before)
- use Direct Cross Entropy to solve for the best policy
Results
- demonstrates improved performance over MMCS and MCTS
- does not need robot communication
- garantees convergence for both finite and infiinte horizon
- can choose exogenous number of nodes in order to gain computational savings